TOOL-TRANSFER-UNIT
VERKTYGS- och FIXTURSKYTTEL
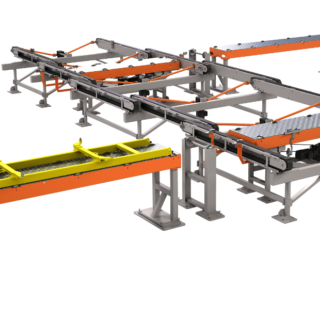
Verktygs- och fixturskytteln används för linjära transporter i din flexibla produktionslinje.
TOOL-TRANSFER-UNIT
Related products
-
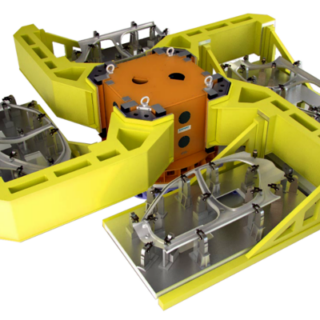
DHE | ROTATE-LIFT-UNIT
DHE | VRIDBORD med LYFT
Expert-Tünkers Vridbord med lyft är ett verktygsförändrande koncept för att förbättra flexibiliteten i din produktionslinje. Systemet är baserat på ett EDH-Heavy-Duty Rotary Table, liknande BMW Multitooling. Denna tabell används som buffert för upp till fyra olika verktyg. Först väljs det önskade verktyget genom buffertbordets rotation. Därefter placeras det valda verktyget exakt av den integrerade lyftmekanismen.